|
|
Recipes << ArduinoServoRecipe | Software Overview | Sitemap | Downloads | Developers | Forums |
|
|
Recipe that Positions a Servo Based on an Analog Input Pin Value
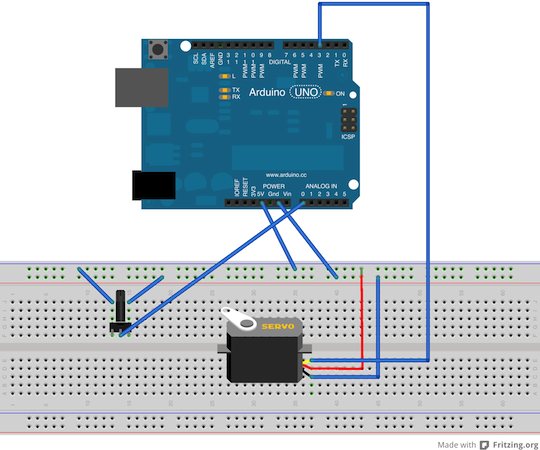
This recipe uses a voltage level on an Arduino analog input pin to position a servo. Positioning is accomplished by using a servo output pin. An easy way to create a variable input voltage is to use a variable resistor connected between 0 and 5V with its wiper pin connected to the Arduino analog input. If you are using a Grove system, use one of their "Rotary Angle Sensor" devices. IngredientsFor this recipe, you will need:
ScriptYou can find the Script in the Scripts "examples" area. The Script is called "rotor_and_servo.script". The Script is as follows: To run this Script, you need 3 parameters: the arduino_port, voltage_pin, and servo_pin parameters. The arduino_port parameter is the name of the USB port where the Arduino is plugged in. On *nix hosts, the USB port name is in the "/dev" directory. To see the devices in order of their creation, type "ls -lrt /dev" at a shell prompt and look near the bottom of the list for your Arduino's USB port. The voltage_pin parameter defines the Arduino pin where the variable resistor is located. It has a default value of "A0" (analog input 0). The servo_pin parameter defines the Arduino pin where the servo is located. It has a default value of 3. As an example, for an Arduino at USB port "/dev/ttyUSB0" with a variable resistor at pin A0 and an servo at pin 3, the Script parameters are:
Running the ScriptRun the Script and change the voltage on the Arduino analog input pin by changing the value of the variable resistor. The servo will move as you change the voltage value. |
Catalina Computing, LLC.Copyright © Catalina Computing, LLC. (2013-2018) 
|
Page last updated: Fri Jan 17 16:33:56 2014 (UTC) |